
机器视觉-图像分割(第一部分)
在计算机视觉领域, 图像分割 (segmentation)指的是将数字图像细分为多个图像子区域(像素的集合)(也被称作超像素)的过程。图像分割的目的是简化或改变图像的表示形式,使得图像更容易理解和分析。图像分割通常用于定位图像中的物体和边界(线,曲线等)。更精确的,图像分割是对图像中的每个像素加标签的一个过程,这一过程使得具有相同标签的像素具有某种共同视觉特性。
图像分割在实际中的应用:
在卫星图像中定位物体(道路、森林等)
人脸识别
指纹识别
交通控制系统
刹车灯检测 Brake light detection
分割的准则
- 预定义的颜色标准 predefined color criterion
- 邻域准则 neighborhood criterion
- 均匀性准则 homogeneity criterion
- 连通性准则 connectedness criterion
- 空间准则 spatial criterion
- 边界光滑准则 boundary smoothness criterion
- 尺寸准则 size criteria
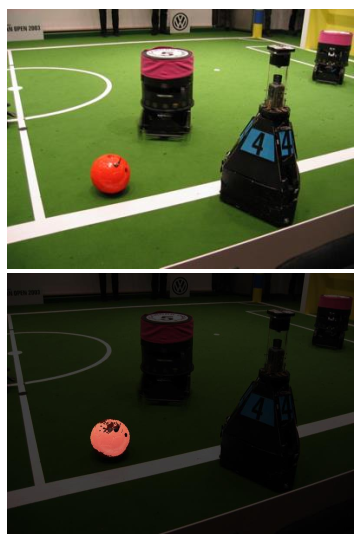
预定义的颜色标准 predefined color criterion
像素颜色属于一组预定义的”有趣”的颜色,它指定了哪些颜色值是相关的,哪些像素是彩色的。
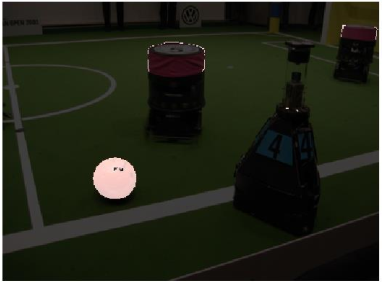
例如,我们在下面的足球机器人场地上找到橙色的球。
橙色的像素点是在HSV值在以下范围的:
$0^{\circ} \leq H \leq 24^{\circ}, 0.4 \leq S \leq 1,0.4 \leq V \leq 1$

注: HSV值(Hue, Saturation, Value)是是根据颜色的直观特性由A. R. Smith在1978年创建的一种颜色空间, 也称六角锥体模型(Hexcone Model)。这个模型中颜色的参数分别是:色调(H),饱和度(S),亮度(V)。
色调H:用角度度量,取值范围为0°~360°,从红色开始按逆时针方向计算,红色为0°,绿色为120°,蓝色为240°。它们的补色是:黄色为60°,青色为180°,品红为300°;
饱和度S:取值范围为0.0~1.0;
亮度V:取值范围为0.0(黑色)~1.0(白色)。
RGB和CMY颜色模型都是面向硬件的,而HSV(Hue Saturation Value)颜色模型是面向用户的。
HSV模型的三维表示从RGB立方体演化而来。设想从RGB沿立方体对角线的白色顶点向黑色顶点观察,就可以看到立方体的六边形外形。六边形边界表示色彩,水平轴表示纯度,明度沿垂直轴测量。
根据颜色进行分割的优缺点:
- 非常快速
- 如果事先知道物体的颜色,并且颜色具有辨别力,则可以应用
- 如果不同的对象共享相同的颜色,则不适用
- 找到合适的颜色规格通常很麻烦
邻域准则 neighborhood criterion
像素颜色与相邻像素的颜色相似,指定哪些颜色相似,将一段中的所有像素分组,这些像素至少有一个已属于该段的相邻像素
例如:如果RGB三元组的欧氏距离小于7/255,则像素是相邻的
根据邻域准则进行图片细分的优缺点:
- 简单
- 物体的颜色不需要知道
- 对象边界必须是高对比度,内部必须是低对比度
- 模糊的图像可能导致分段不足,嘈杂的图像可能导致分段过度
均匀性准则 homogeneity criterion
像素颜色与线段的分割颜色相似,指定如何计算平均的颜色并确定两种颜色是否相似。将所有像素分组到一段中,这些像素与分割的平均颜色相似
例如:与球的平均颜色相似的像素,都属于此分割颜色

通过均匀性准测进行图像分割的优缺点:
- 物体的颜色不需要知道
- 对象的所有部分都必须具有相似的颜色
- 不支持低频率的颜色变化
- 循环定义
连通性准则 connectedness criterion
同一段中的所有像素必须连接,即在该段的两个像素之间有一条不离开该段的路径

优缺点:
此标准可以与其他标准相结合
空间准则 spatial criterion
被另一部分的像素包围的像素应该属于该部分(另一部分)
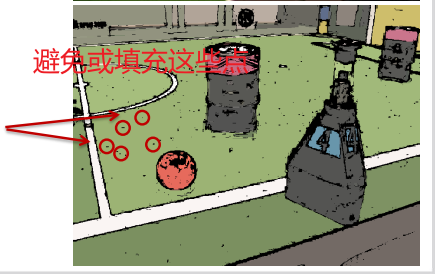
优缺点:
- 标准与其他标准相结合
- 提高了抗噪性
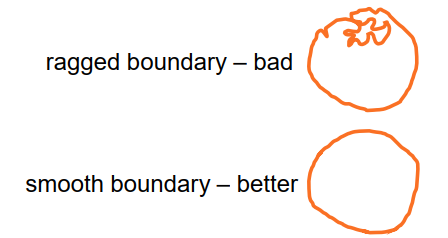
边界光滑准则 boundary smoothness criterion
分割的边界应平滑,而不是参差不齐。
优缺点:
- 标准与其他标准相结合
- 提高了抗噪性
尺寸准则 size criteria
分割的大小应在一定范围内/不太小/不太大
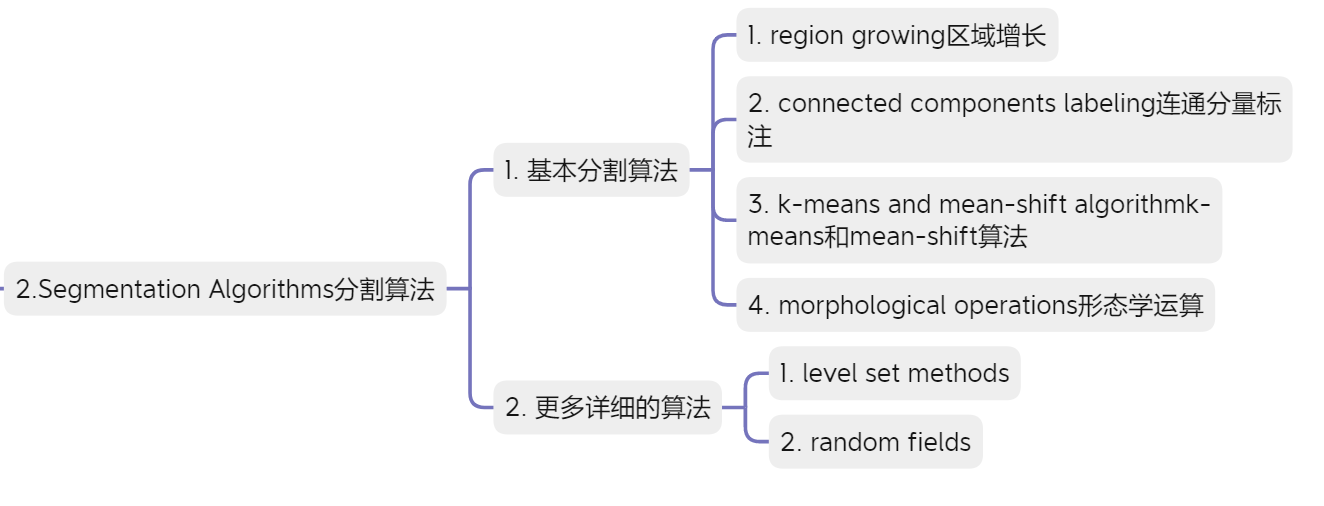
分割算法
基础算法:
- 区域增长 region growing
- 连接组件标记 connected components labeling
- K-means和mean-shift算法
- 形态学运算 morphological operations
更详尽的算法:
1.水平集方法 level set methods
2.随机场 random fields
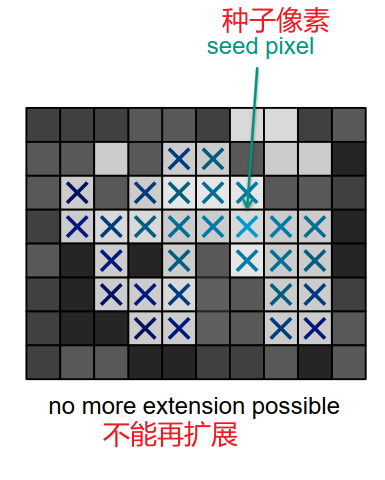
区域增长 region growing
区域生长(region growing)是指将成组的像素或区域发展成更大区域的过程。从种子点的集合开始,从这些点的区域增长是通过将与每个种子点有相似属性像强度、灰度级、纹理颜色等的相邻像素合并到此区域。
区域生长算法的基本思想是将有相似性质的像素点合并到一起。对每一个区域要先指定一个种子点作为生长的起点,然后将种子点周围领域的像素点和种子点进行对比,将具有相似性质的点合并起来继续向外生长,直到没有满足条件的像素被包括进来为止。这样一个区域的生长就完成了。这个过程中有几个关键的问题:(原文链接:https://blog.csdn.net/weixin_40647819/article/details/90215872)
核心思想:从一个/多个种子点开始(必须提供种子点);增量扩展段,直到无法添加更多像素;实现连通性标准+同质性或邻域标准;产生单一的片段。
优缺点:
- 易于实现(广度优先搜索)
- 需要一个或多个种子点
连接组件标记算法 connected components labeling(CCL)
连接组件标记算法(connected component labeling algorithm)是图像分析中最常用的算法之一,算法的实质是扫描一幅图像的每个像素,对于像素值相同的分为相同的组(group),最终得到图像中所有的像素连通组件。 扫描的方式可以是从上到下,从左到右,对于一幅有N个像素的图像来说,最大连通组件个数为N/2。扫描是基于每个像素单位,对于二值图像而言,连通组件集合可以是V={1|白色}或者V={0|黑色}, 取决于前景色与背景色的不同。 对于灰度图像来说,连图组件像素集合可能是一系列在0 ~ 255之间k的灰度值。
引用自:知乎
核心思想:创建图像的完整分割;实现连通性标准+邻域标准;仅通过确定与两个相邻像素的相似性,将每个像素分配给分段
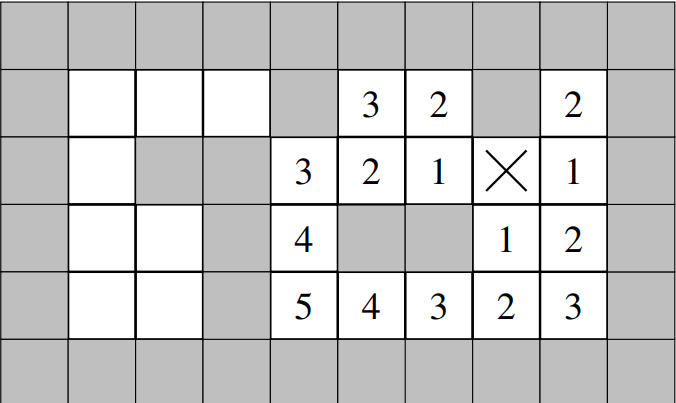
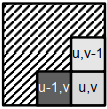
我们从左上角到右下角逐行访问像素,并立即将它们分配给一个段。
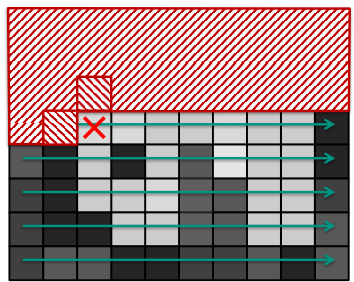
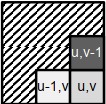
当我们访问一个像素(u,v)时,我们已经访问了(u-1,v)和(u,v-1)。我们比较颜色(u,v)和颜色(u-1,v),颜色(u,v-1),五种情况:
-
(u,v)和(u-1,v)处的像素颜色相似,(u,v)和(u,v-1)处的像素颜色不同
→ 像素(u,v)和(u-1,v)属于同一段
→ 我们将像素(u,v)分配给像素(u-1,v)的部分
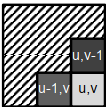
-
(u,v)和(u-1,v)处的像素颜色不同,(u,v)和(u,v-1)处的像素颜色相似
→ 像素(u,v)和(u,v-1)属于同一段
→ 我们将像素(u,v)分配给像素(u,v-1)的部分
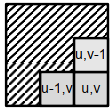
-
(u,v)和(u-1,v)处的像素颜色不同,(u,v)和(u,v-1)处的像素颜色不同
→ 为什么像素(u,v)应该属于(u-1,v)或(u,v-1)的段?
→ 我们创建一个新段,并为其指定像素(u,v)
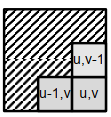
-
(u,v)和(u-1,v)处的像素颜色是相似的,(u,v)和(u,v-1)处的像素颜色是相似的,像素(u-1,v)和(u,v-1)属于同一段。
→ 像素(u,v)也属于该部分
→ 我们将像素(u,v)分配给该段
-
(u,v)和(u-1,v)处的像素颜色相似,(u,v)和(u,v-1)处的像素颜色相似,像素(u-1,v)和(u,v-1)不属于同一段
→ 像素(u,v)属于两个相邻的部分
→ 我们合并两个相邻的段,并将像素(u,v)分配给合并的段
K均值聚类算法 K-means
k均值聚类算法(k-means clustering algorithm)是一种迭代求解的聚类分析算法,其步骤是,预将数据分为K组,则随机选取K个对象作为初始的聚类中心,然后计算每个对象与各个种子聚类中心之间的距离,把每个对象分配给距离它最近的聚类中心。聚类中心以及分配给它们的对象就代表一个聚类。每分配一个样本,聚类的聚类中心会根据聚类中现有的对象被重新计算。这个过程将不断重复直到满足某个终止条件。终止条件可以是没有(或最小数目)对象被重新分配给不同的聚类,没有(或最小数目)聚类中心再发生变化,误差平方和局部最小。
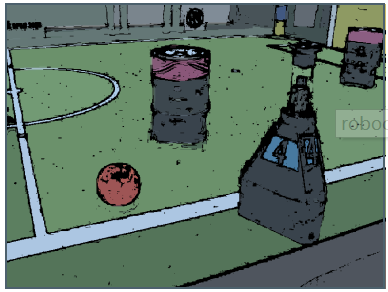
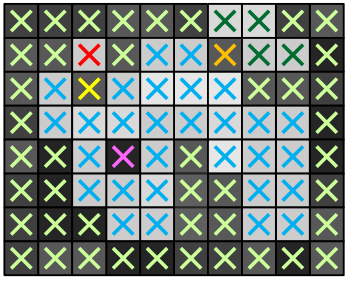
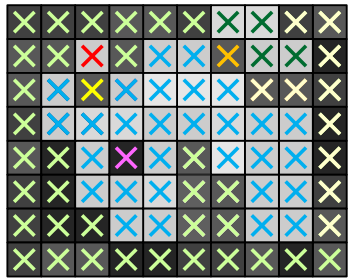
核心思想:图像由相似颜色的区域组成; 寻找颜色的簇; 将每个像素指定给其颜色簇; 实现同质性标准; 创建完整的分割。
在上面图片中的颜色簇:绿色,白色,橙色,黑色,品红,蓝,黄色,灰色
怎么找到颜色簇呢? 如果我们知道簇的数量 –> k-means 算法
- 随机初始化k原型颜色c1、c2、…、ck(例如,从图像中随机选取像素)
- 将每个像素指定给最相似的原型颜色
- 通过对步骤2中指定的像素颜色进行平均,重新计算原型颜色
- 重复第2步和第3步,直到收敛(即第2步中的赋值不再改变)
例如:
第1步:从两个像素中随机选择颜色;
第2步:将像素分配给最相似的簇;
第3步:重新计算原型颜色;
第2步:重新分配像素;
第3步:重新计算原型颜色;
第2步:重新分配像素→ 汇聚



k-均值算法
优点:
•简单、易于实现
缺点:
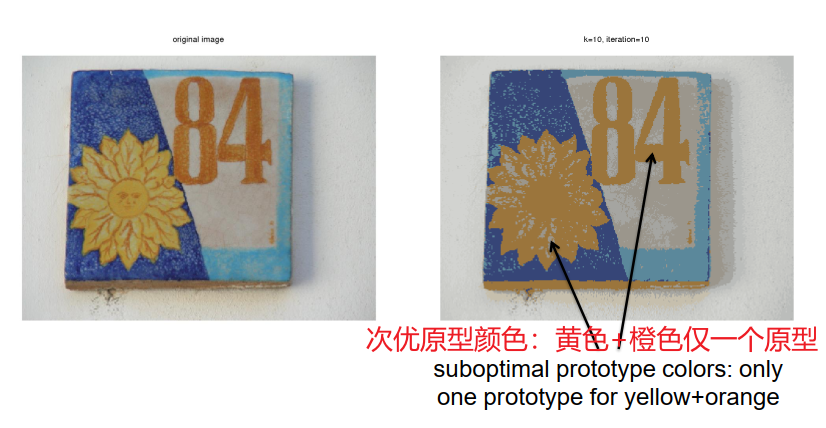
•必须知道聚类数(k)
•通常会收敛到次优聚类(取决于初始原型颜色)
未知聚类数的改进: mean-shift 均值漂移
- 需要颜色的相似性度量
- 对于每个像素p,按如下步骤进行:
1.确定p的颜色并将其分配给变量c
- 找到图像中与c相似的所有像素的集合S
- 计算S的平均颜色并将其分配给变量c(不要改变图像中p的像素值 不要改变图像中p的像素值!)
- 重复步骤2和3,直到收敛(即直到步骤2中的S保持不变)。
- 最后,c是像素p所属区段的原型颜色。
示例: 沿一个轴排列所有像素颜色(灰度值)

第1步:选择目标像素的颜色并初始化c 第2步:找到相似像素的集合S 第3步:计算S的平均颜色并将其分配给c 第2步:重新计算S 第3步:重新计算S的平均颜色并将其分配给c 第2步:重新计算S 第3步:重新计算S的平均颜色并将其分配给c 第2步:重新计算S→收敛
